实验结果及分析
4.5.1基本模糊控制效果
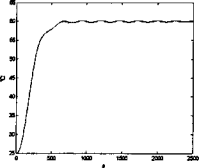
室温条件下,关闭箱盖,开机,设定目标温度60C,目标湿度80%,运行 时间lh,打开数据存储功能,控制算法仅使用基本模糊控制,根据量化因子和 比例因子对系统动静态性能影响的规律,反复调节试验,确定参数,温度模糊 控制系统中ke=l/6,kde=9,ku=l/18;湿度模糊控制系统中ke=l/3,kde=7,ku=l/12 时,能够基本达到效果。运行完成,用U盘下载EPROM中记录的温度数 据,绘制曲线如图4-9(a)(b)所示。湿度的实际控制效果无超调,调节时间15min, 稳态误差±1%RH,能够满足应用要求。温度的实际控制效果基本无超调,调节 时间llmin,稳态误差±1笆。实验结果表明,单一的模糊控制,虽然能实现模 糊控制无超调和调节时间短的动态效果优势,但稳态效果差的缺点无法克服。 由于一般实验对温度要求较髙,所以需要对温度控制进一步改进。




for humidity
4.5.2带在线插值的模糊控制效果
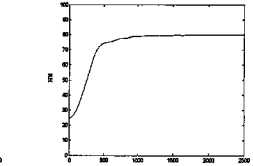
室温条件下,关闭箱盖,开机,设定目标温度60°C,运行时间lh,打开数
据存储功能,控制算法在使用基本模糊控制的基础上,增加在线插值算法,根 据量化因子和比例因子对系统动静态性能影响的规律,反复调节试验,确定 ke=l/7, kde=9, ku=l/19时,能够基本达到效果。运行完成,用U盘下载 EPROM中记录的温度数据,绘制曲线如下图4-10所示。与单一模糊控制效果 对比,实际控制效果与仿真结果基本一致,均无超调,实际调节时间lOmin,稳 态误差士0.5-C,实验结果表明,带有在线插值的模糊控制方法不但充分利用了 模糊控制算法对动态控制的优势,而且能修正了单一模糊控制稳态效果差的不 足,且控制速度快,运算量小,可基本满足实验室的需求,效果较理想。
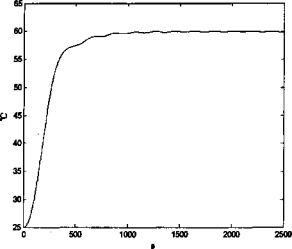
图4-10带在线插值的模糊控制效果
Fig.4-10 Result of fiizzy control with online interpolation algorithm
4.5.3带在线插值的模糊PID控制效果
室温条件下,,关闭箱盖,开机,设定目标温度60-C,运行时间lh,打开数 据存储功能,控制算法在使用带有在线插值的模糊PID控制。运行完成,用U 盘下载EPROM中记录的温度数据,绘制曲线如图4-11所示。实际控制效果无 超调,调节时间13min,稳态误差土0.1 °C.实验结果表明,在线插值模糊PID 算法兼顾了模糊控制和PID控制的优点,动态和稳态效果均理想,具有很好的 实用价值。

图441带在线插值的模糊PID控制效果
Fig,4-ll Result ofFuzzy-PID control with online interpolation algorithm